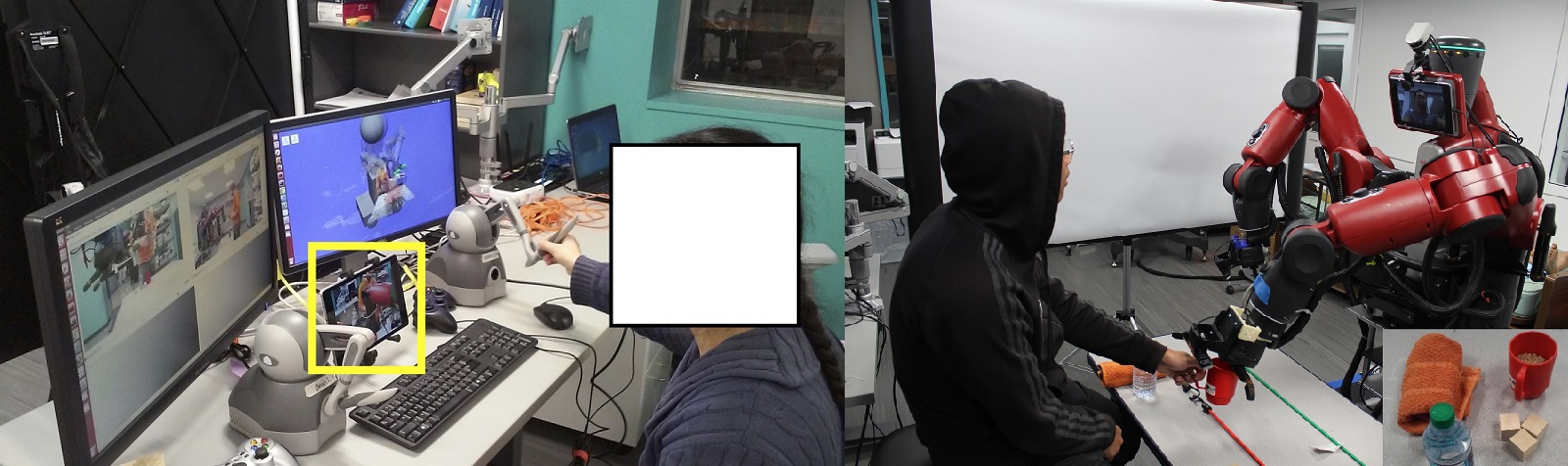
The addition of manipulation capabilities to telepresence robots holds the promise of enabling remote humans to perform tele-labor, hands-on training, and collaborative manipulation, but the use of a robot as a mediator to humanhuman physical interaction is not yet well understood. This paper studies the impact of telepresence modalities in the context of robot-mediated object handover. A teleoperation system was developed involving a bimanual mobile manipulator with telepresence head and sensing capabilities, and a user study was conducted with n=10 pairs of subjects under a variety of audio and visual telepresence conditions. Results show that telepresence does not significantly affect objective handover fluency, but both audio and video telepresence do significantly improve user experience on subjective measures including intimacy and perceived fluency.
Publication
- Jianqiao Li, Zhi Li, Kris Hauser, “A Study of Bidirectionally Telepresent Tele-Action During Robot-Mediated Handover”, In 2017 IEEE International Conference on Robotics and Automation (ICRA), pp. 2890-2896. PDF