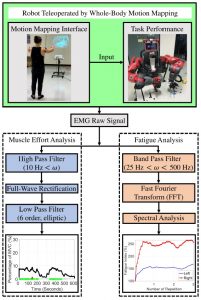
Robot teleoperation via motion mapping has been demonstrated to be an efficient and intuitive approach for controlling and teaching the whole-body motion coordination of humanoid robots. However, the physical fatigue in the usage of such robot teleoperation interfaces may prevent this approach to be widely used in large scale by diverse workforce populations. As a result, this paper conducts a user study to investigate the physical fatigue of teleoperators in the whole-body motion mapping teleoperation of a mobile humanoid assistive robot. Through a Vicon motion capture system, participants teleoperated the robot to perform general purpose assistive tasks that involve reaching-to-grasp, bimanual manipulation, loco-manipulation and human-robot interaction. We assess the physical fatigue based on sEMG measurement, and compare it between different tasks and muscles. Our analysis results indicate that: (1) Fatigue happens more in the tasks that involve more precise manipulation and steady posture maintenance; (2) Deltoids, Biceps and Trapezius are used more for such tasks and thus have more fatigue than others. These findings imply that automating the fatigue-causing task components may reduce the physical fatigue in motion mapping teleoperation.
Demo
- To be added
Publication
- Tsung-Chi Lin, Achyuthan Unni Krishnan and Zhi Li, “Physical Fatigue Analysis of Assistive Robot Teleoperation via Whole-body Motion Mapping”, submitted to 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).