High-level control is generally preferred for the control of complex robot platforms and by users inexperienced with robot teleoperation. However, high-level teleoperation interfaces can be less effective if the robot autonomy is not reliable. To address this problem, it is important to understand how the users’ preference of teleoperation interface may vary with the reliability of the robot autonomy, and understand what design features ameliorate the frustration and effort caused by unreliable autonomy.
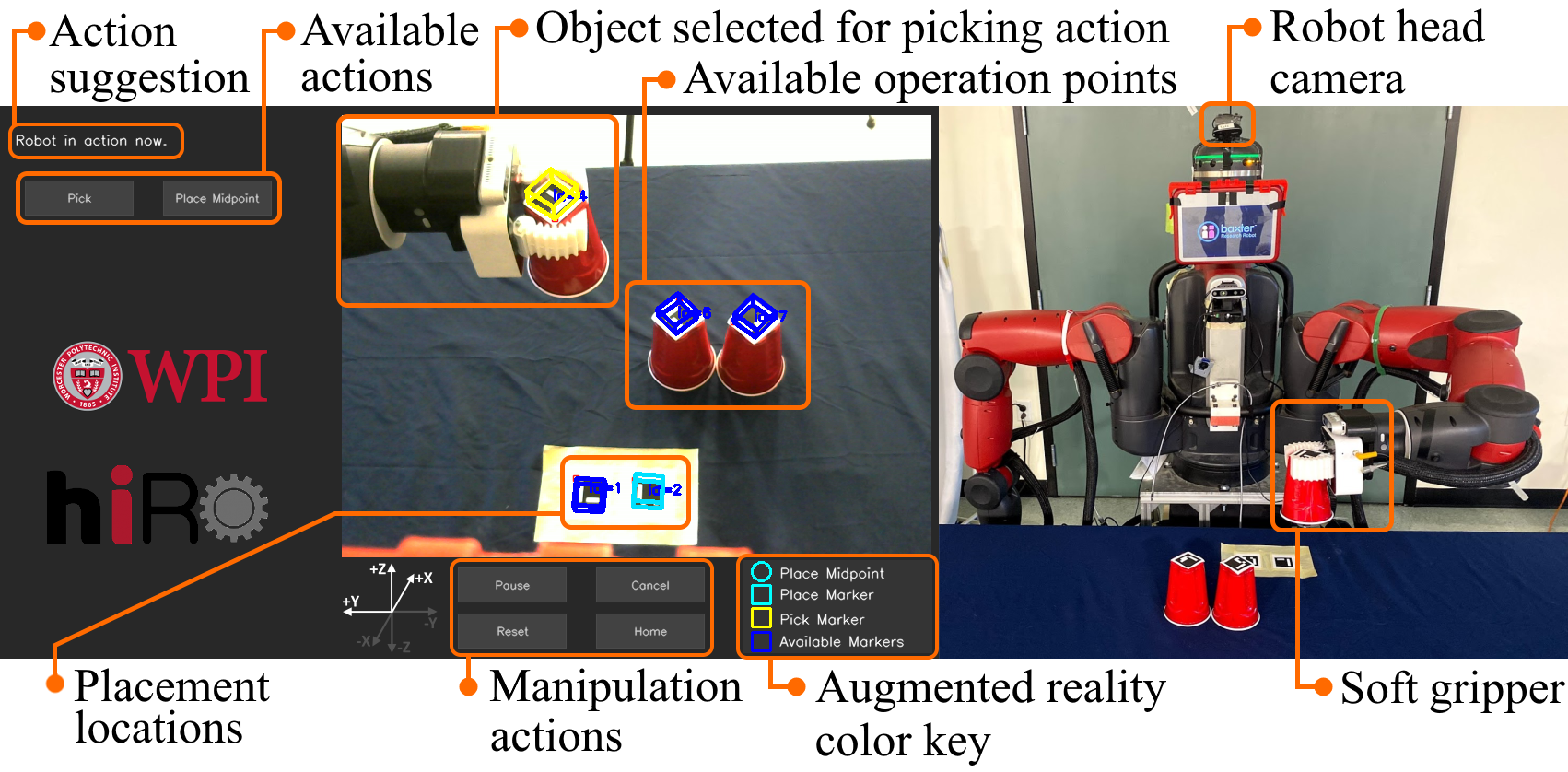
We proposed a graphical user interface for high-level robot control. The framework of the interface enables teleoperators to control a robot at the action level, and incorporates a simple but effective design that enables teleoperators to recover from task failure in a number of ways. We conducted a user study ($N=25$) to compare the performance and user experience when using the proposed high-level interface to a low-level interface (i.e., gamepad) for robot low-level control, on a representative manipulation task. We also investigated if the high-level teleoperation interface remains effective if the reliability of robot autonomy decreases. Our results show that a high-level interface able to handle the most frequent errors is resilient to the effects of unreliable robot autonomy. Although the total task completion time increased as the robot autonomy becomes unreliable, the users’ perception of workload and task performance are not affected. Through the user study, we also reveal the desirable interface features.
Publication
- Samuel White, Keion Bisland, Michael Collins, and Zhi Li, “Design of a High-level Teleoperation Interface Resilient to the Effects of Unreliable Robot Autonomy“, In 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 11519-11524, IEEE, 2020.