
Performance and Preference with Various Active Telepresence Cameras
This work aims to understand human preference in camera selection and control in the teleoperation of a complex robot system with multiple perception and action components. We investigate natural human perception-action coordination in a Virtual Reality (VR) setting, where manipulator motion control is not an issue. Specifically, we conducted a user study (n=14) for a cup-stacking task, which involves gross and precise manipulation and active perception motions. This task was performed with visual feedback limited to cameras attached to the head, chest, and hands of a human subject, made available via a VR headset. The camera usage was recorded and analyzed with respect to the distinct manipulation actions being performed. Our study found that conflicting trends in subject preference and task performance demand a more nuanced examination of subject preference. We present a collection of observed behaviors in terms of perception and manipulation actions that lays the foundation for a shared autonomy controller and suggests a method for classifying subjects according to their spatial skill in teleoperation.
Demo
Publication
- Alexandra Valiton and Zhi Li, “Perception-Action Coupling in Usage of Telepresence Cameras“, in 2020 IEEE International Conference on Robotics and Automation (ICRA), pp. 3846-3852. IEEE, 2020, Finalist of Best Paper for Human-Robot Interaction PDF
The Coupling of Vision, Haptics and Motions in Tele-manipulation
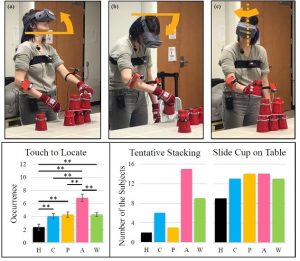 Robot teleoperation is a reliable way to perform a variety of tasks with complex robotic systems. However, the remote control of active telepresence cameras on the robot for improved telepresence adds an additional degree of complexity while teleoperating and can thus affects the operator’s performance during tele-manipulation. Our previous user study (N=16) investigates the general human performance and preference when using various wearable cameras. In this paper, we further investigate how humans adapt to the usage of telepresence cameras in terms of motion behavior. The findings from our human motion analysis inform several desired designs for robot teleoperation interfaces and assistive autonomy.
Robot teleoperation is a reliable way to perform a variety of tasks with complex robotic systems. However, the remote control of active telepresence cameras on the robot for improved telepresence adds an additional degree of complexity while teleoperating and can thus affects the operator’s performance during tele-manipulation. Our previous user study (N=16) investigates the general human performance and preference when using various wearable cameras. In this paper, we further investigate how humans adapt to the usage of telepresence cameras in terms of motion behavior. The findings from our human motion analysis inform several desired designs for robot teleoperation interfaces and assistive autonomy.
Demo
Publication
- Tsung-Chi Lin, Achyuthan Unni Krishnan and Zhi Li, “How People Use Active Telepresence Cameras in Tele-manipulation”, accepted by IEEE International Conference on Robotics and Automation (ICRA), 2021.