Advisor
Jane Li (zli11@wpi.edu)
Assistant Professor with Robotics Engineering and Mechanical Engineering
Academic Year: 2017-2018
Major: RBE, ME
Project Goal
- Design and build a Precise Positioning Unit to enable a tele-nursing robot to performance tasks of fine motor skills
- Investigate the finger-hand-arm coordination and propose control strategies to coordinate the macro- and micro-structures of a robotic manipulator
Project Description
- Telenursing robot
During outbreaks of contagious diseases, healthcare workers are at high risk for infection due to routine interaction with patients, handling of contaminated materials, and challenges associated with safely removing protective gear. This poses an opportunity for the use of remote-controlled robots that could perform common nursing duties inside hazardous clinical areas, thereby minimizing the exposure of healthcare workers to contagions and other biohazards. Therefore, we developed a Tele-Robotic Intelligent Nursing Assistant (TRINA), which consists of a mobile manipulator robot, a human operator’s console, and operator assistance algorithms which automate or partially-automate tedious and error-prone tasks, to perform light/medium duty nursing tasks to attend patients with highly infectious diseases.
- ROBOPuppet

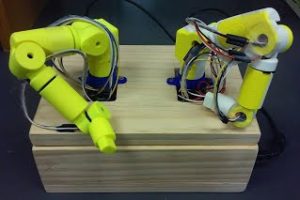
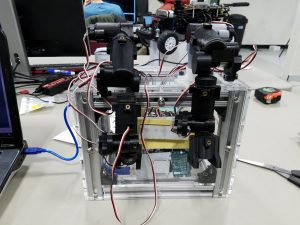
The Robopuppet project aims to expand upon Duke University’s Robopuppet prototype for TRINA robot. The new prototype can control both robot arms and grippers. In addition to the passive RoboPuppet, we also design a motorized RoboPuppet whcih can hold robot position without user input, and enable an easy robot (dis)engagement in teleoperation.
Project Status
A non-motorized (passive) Robopuppet has been developed in order to test the controller design for structural stability and comfort. This design has also been used to test the software used to map the controller input to TRINA. A prototype of this design has been constructed and tested with robot simulation and physical platform.
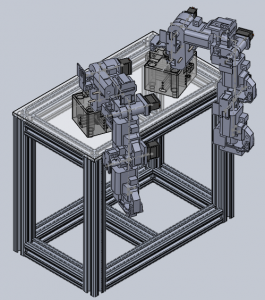
A motorized (active) Robopuppet was designed to maintain the posture consistency of the input device and robot when they are disengaged. The design was improved to be easier to print and assemble. It was also made more spacious to make room for motors. Electrically, the design uses a Teensy Microcontroller and have switched from using potnetiometer joint sensors to using hall effect encoders in order to reduce noise during readings.
Required Skills
Mechanical design (Solidworks), Programming (C/C++, Python), Mechatronics