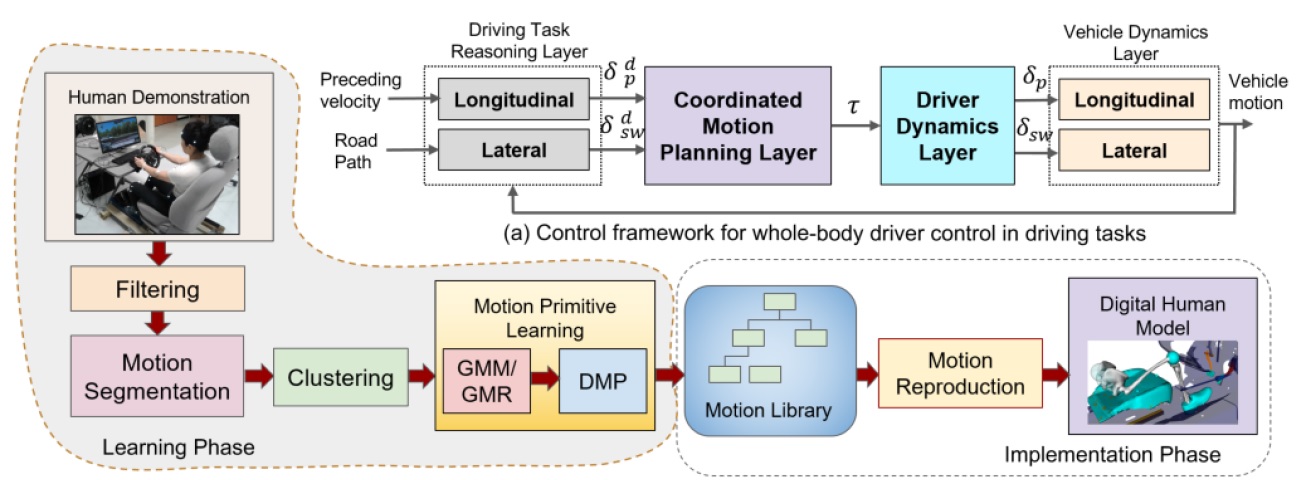
High-fidelity computational human models provide a safe and cost-efficient method for the study of driver experience in vehicle maneuvers and for the validation of vehicle design. Compared to passive human model, an active human model that can reproduce the decision-making, as well as vehicle maneuver motion planning and control will be able to support more realistic simulation of human-vehicle interaction. In this project, we propose a integrated human-vehicle interaction simulation framework that can learn the motion primitives of vehicle maneuver motions from human drivers, and use them to compose natural and contextual driving motions in simulation. Specifically, we recruit seven experienced drivers and record their vehicle maneuver motions on fixed-base driving simulation testbed. We further segmented the collected data and classified them based on their similarity in joint coordination. Using a combination of imitation learning methods, we extracted the regularity and variability of vehicle maneuver motions across subjects, and learned the dynamic motion primitives that can be used for motion reproduction in simulation. Our research efforts lead to a motion primitive library that can be used for planning natural and contextual driver motion, and will be integrated with the driving decision-making, motion control, and vehicle dynamics in the proposed framework for simulating human-vehicle interaction.
- Representative publications
- Kimpara, Hideyuki, Mbanisi, Kenechukwu, Fu, Jie, Li, Zhi, Prokhorov, Danil, and Gennert, Michael, “Human Model-based Active Driving System in Vehicular Dynamic Simulation,”, in submission to IEEE Intelligent Transportation Systems Transactions PDF
- Kenechukwu C. Mbanisi, Hideyuki Kimpara, Tess Meier, Michael Gennert and Zhi Li “Learning Coordinated Vehicle Maneuver Motion Primitives from Human Demonstration”, Accepted by 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). PDF
- Kenechukwu C. Mbanisi, Tess B. Meier, Hideyuki Kimpara, Jie Fu, Michael A. Gennert, and Zhi Li, “Learning Movement Primitives for Driving Tasks from Human Demonstration”. 8th World Congress on Biomechanics (WCB 2018)
- Kenechukwu C. Mbanisi, Hideyuki Kimpara, Jie Fu and Zhi Li, “A Control Architecture for Rendering Passive and Active Whole-body Coordination in Driving Tasks”, IROS 2017 Workshop on Human Movement Understanding for Humanoid and Wearable Robots, Vancouver, BC, Canada, September, 2017. PDF