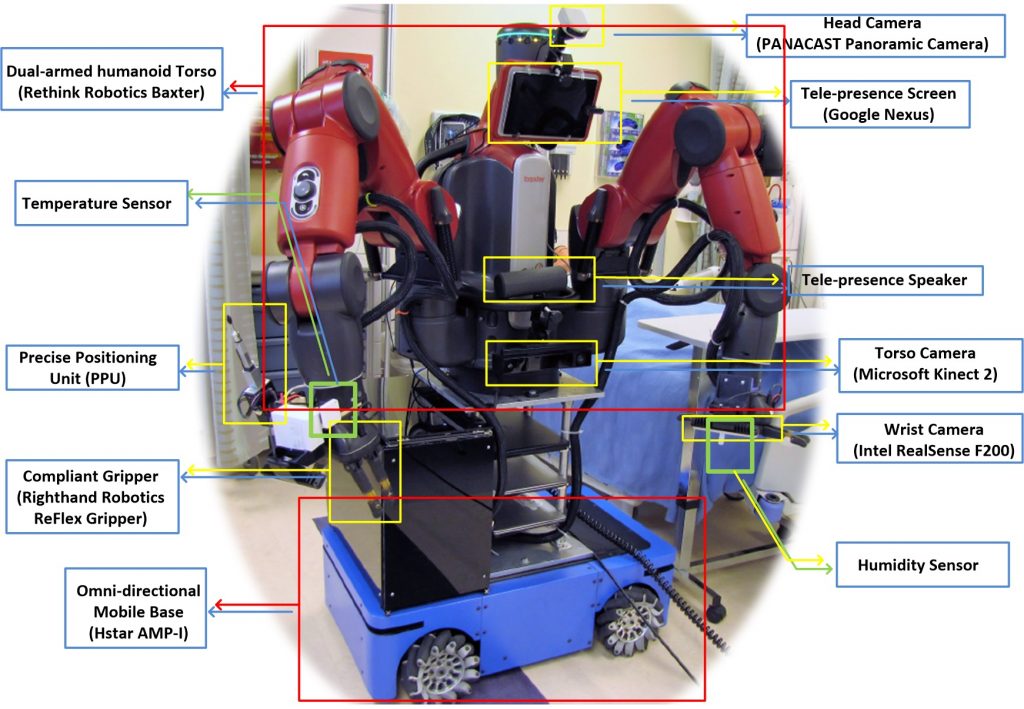
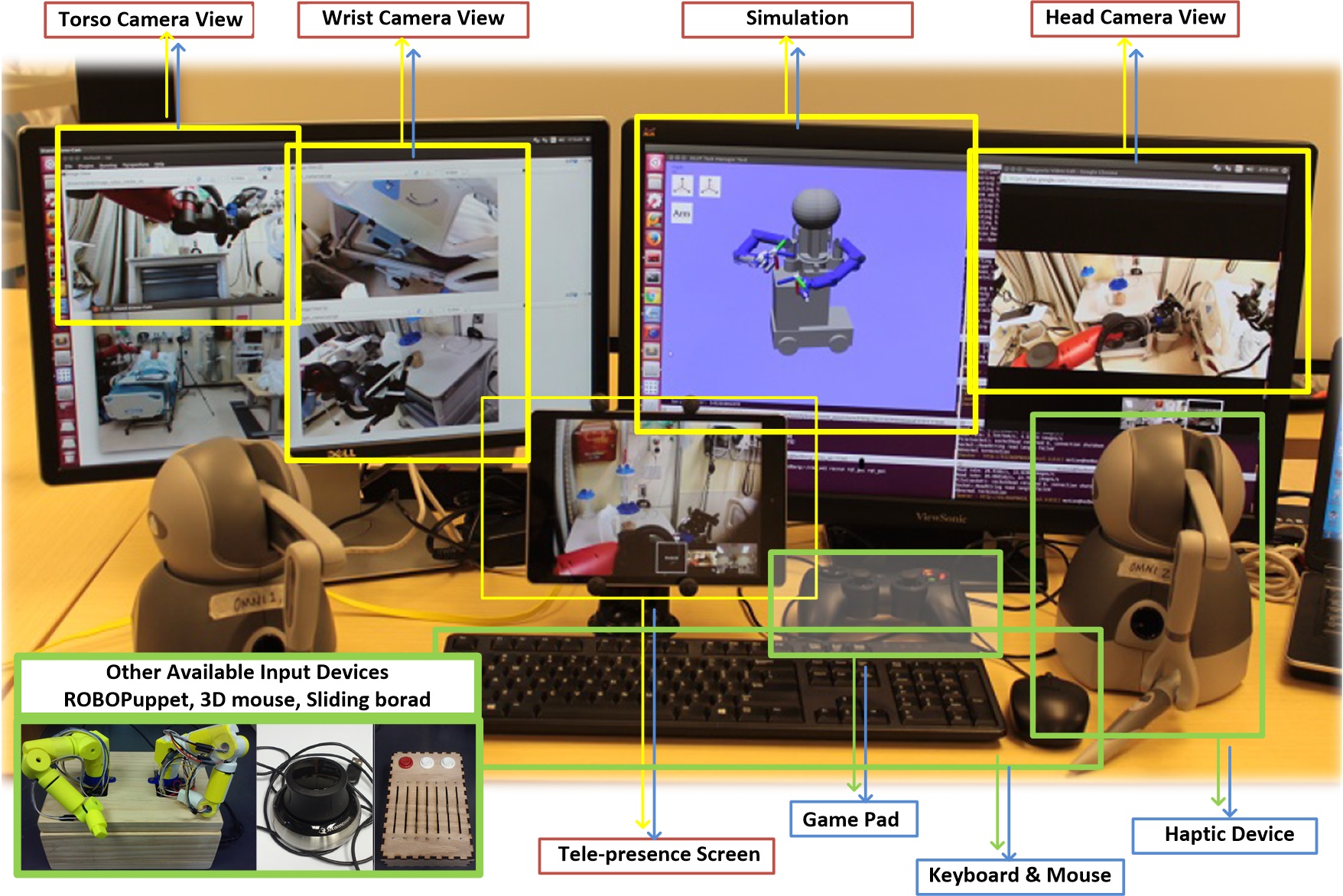
During outbreaks of contagious diseases, healthcare workers are at high risk for infection due to routine interaction with patients, handling of contaminated materials, and challenges associated with safely removing protective gear. This poses an opportunity for the use of remote-controlled robots that could perform common nursing duties inside hazardous clinical areas, thereby minimizing the exposure of healthcare workers to contagions and other biohazards. This paper describes the development of the prototype system Tele-Robotic Intelligent Nursing Assistant (TRINA), which consists of a mobile manipulator robot, a human operator’s console, and operator assistance algorithms which automate or partially-automate tedious and error-prone tasks. Using off-the-shelf robotic and sensing components, total hardware costs are kept under $75,000. The system’s capabilities for performing standard nursing tasks are evaluated in the simulation laboratory of a nursing school.
System Integration

System Evaluation
Publication
- Zhi Li, Peter Moran, Qingyuan Dong, Ryan Shaw, Kris Hauser, “Development of a Tele-Nursing Mobile Manipulator for Remote Care-giving in Quarantine Areas”, In 2017 IEEE International Conference on Robotics and Automation (ICRA), pp. 3581-3586. PDF