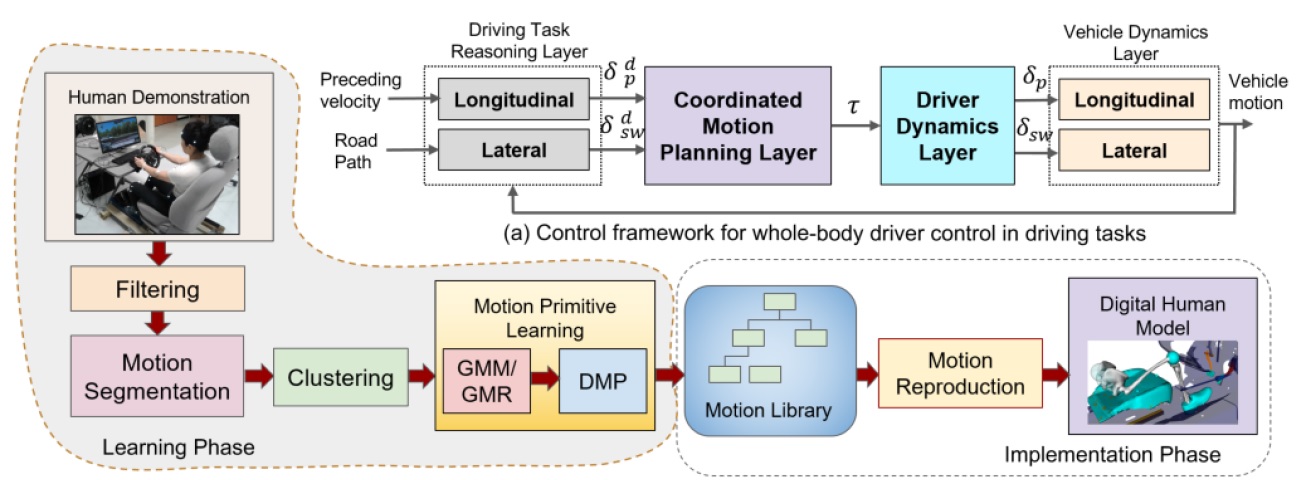
Recent advances in the development of active vehicle safety and intelligent driving systems are owed partly to the use of high-fidelity computational driver models. These models enable predictive simulation and analysis of driver behavior in a broad range of driving scenarios. However, existing models paid limited attention to realistic rendering of maneuver motions employed in steering and pedal activation tasks. In this paper, we propose a systematic approach for learning the motion primitives of vehicle maneuver motions from human drivers, and use them to compose natural and contextual driving motions in simulation. Specifically, we recruited eight experienced drivers and recorded their vehicle maneuver motions on a fixed-base driving simulation test bed. We further extracted a set of characteristic vehicle maneuver motion styles from the demonstration data. Using a combination of imitation learning methods, we extracted the regularity and variability of vehicle maneuver motion styles across participants, and modeled them as motion primitives that can be used for motion reproduction in simulation. Our proposed method enables the learning of coordinated steering and pedal activation motions from human driving data, and the reproduction of whole-body coordination on our integrated cognitive-physical simulation framework for human-vehicle interaction.
Demo
Publication
- Kenechukwu C. Mbanisi, Hideyuki Kimpara, Michael A. Gennert and Zhi Li, “Learning Natural Vehicle Maneuver Motion Primitives for Computational Human Driver Modeling”, submitted to IEEE Intelligent Transportation Systems Transactions.
- Hideyuki Kimpara, Kenechukwu Mbanisi, Zhi Li, Danil Prokhorov, and Michael Gennert, “Human Model-based Evaluation of Overtaking Performance and Driver Control Workloads”, submitted to IEEE Transactions on Human-Machine Systems
- Kenechukwu C. Mbanisi, Hideyuki Kimpara, Tess Meier, Michael Gennert and Zhi Li “Learning Coordinated Vehicle Maneuver Motion Primitives from Human Demonstration”, Accepted by 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). PDF
- Kenechukwu C. Mbanisi, Tess B. Meier, Hideyuki Kimpara, Jie Fu, Michael A. Gennert, and Zhi Li, “Learning Movement Primitives for Driving Tasks from Human Demonstration”. 8th World Congress on Biomechanics (WCB 2018)