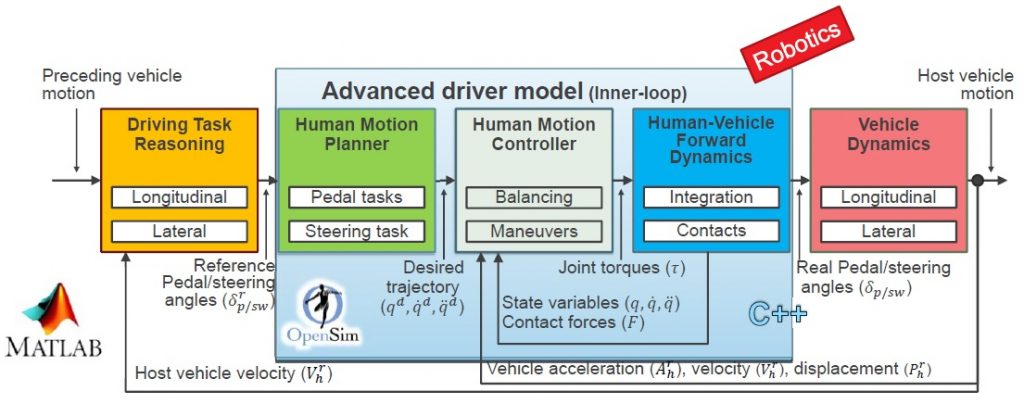
High-fidelity computational human models provide a safe and cost-efficient method for studying driver experience in vehicle maneuvers and for validation of vehicle design. Compared to passive human models, active human models capable of reproducing the decision-making, as well as vehicle maneuver motion planning and control, will be able to support realistic simulation of human-vehicle interaction. This study proposes a new system framework, the human model-based active driving system (HuMADS) for simulating human driver-vehicle interactions. HuMADS integrates the vehicle controller with models of vehicle dynamics and human biomechanics. It has a hierarchical closed-loop architecture for driver-vehicle control systems, including structures and contact interfaces of human and vehicle bodies. HuMADS is based on the OpenSim simulation platform. The developed system regulates the human model dynamics, such that the human model can react realistically to vehicle maneuver motions. The usability of the HuMADS is demonstrated through the simulation of coordinated gas/brake pedal operation and wheel-steering in highway driving tasks. The simulated vehicle dynamics and vehicle maneuvers are comparable with previously published experimental data of car-following driving. In addition, the proposed controllers successfully maintain the human body’s balance inside the vehicle during vehicle maneuvers. We are convinced that the HuMADS has potential as a tool for development of intelligent transportation systems and investigation of integrated safety.
Publication
- Hideyuki Kimpara, Kenechukwu Mbanisi, Zhi Li, Danil Prokhorov, and Michael Gennert, “Human Model-based Evaluation of Overtaking Performance and Driver Control Workloads”, submitted to IEEE Transactions on Human-Machine Systems