High-fidelity computational human models can be integrated with robot geometric and dynamic models, to evaluate human performance as well as robot design, motion planning and control. It also provides a safe and cost-efficient method for the evaluation ergonomics design devices and environment for assistive living. To this end, we propose a novel computational human modeling framework that endow a biomechanical human model with the capability of rendering human decision-making, coordinated motion planning, and motion control. Our prior efforts has integrated this active human model with an vehicle model to evaluate the compatibility of augmented driving system. Our on-going work focuses on the motion learning and control of the whole-body motion coordination for loco-manipulation (e.g., walking while handing-over objects) and motion transition (e.g., from sitting to standing) tasks. With more advanced motion capabilities, this computational human model will be suitable for evaluating assistive and rehabilitation exoskeletons in the simulation of human-robot interaction.
Research Project
The research project was funded by Toyota Japan in 2017-2018. The prior and on-going projects include:
- Computational modeling of human-exoskeleton interaction
- Motion controllers for loco-manipulation
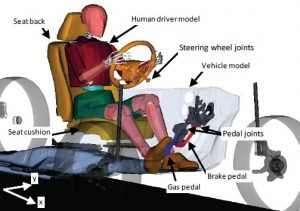
- Computational modeling of human-vehicle interaction (WPI PhD Kene Mbanisi and Research Scientist Hideyuki Kimpara from Toyota Japan)