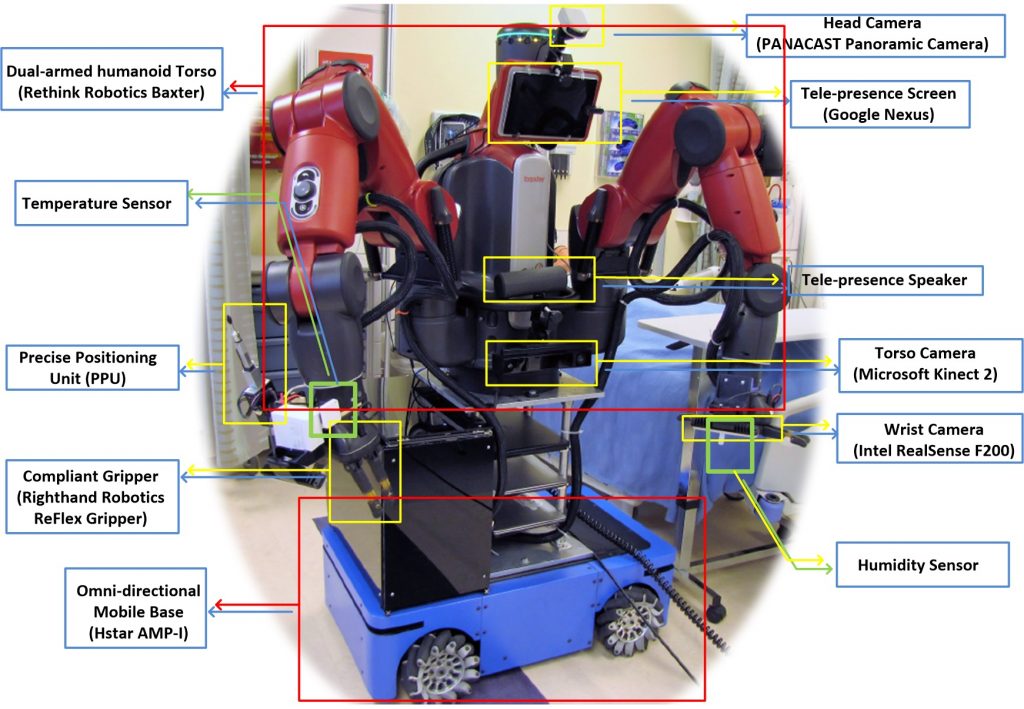
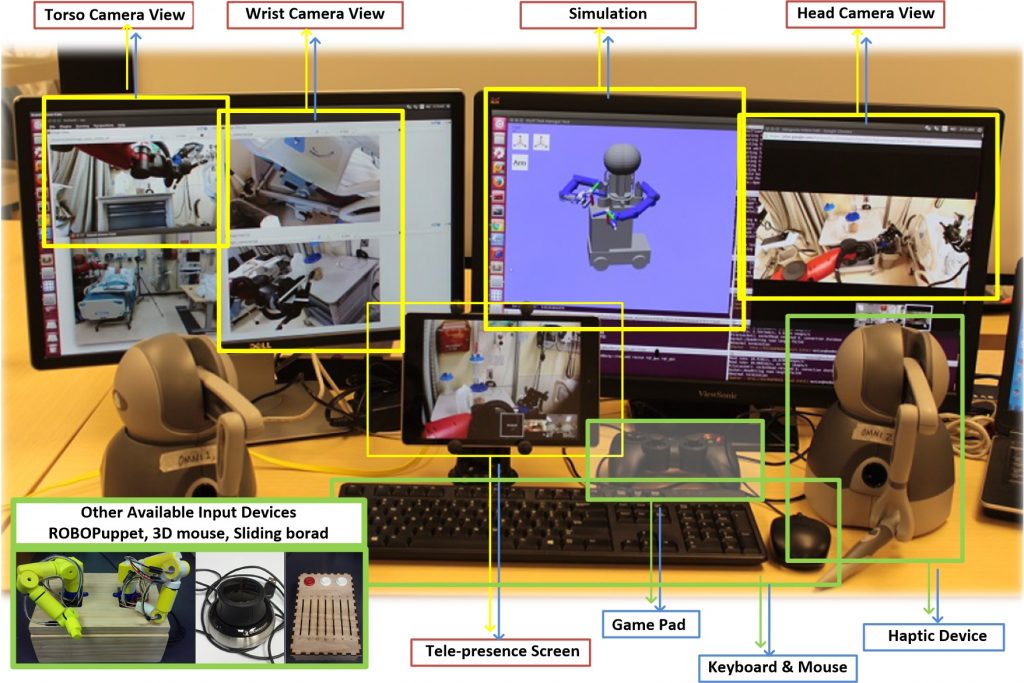
In response to the outbreak of highly infectious diseases, such as Ebola (2015) and Zika (2016), a Tele-Robotic Intelligent Nursing Assistant (TRINA) was developed by me and Dr. Hauser at Duke University to assist healthcare workers in routine patient-caring tasks, handling of contaminated materials and protective gear. This tele-nursing robot consists of a mobile manipulator robot, a human operator’s console, and software that supports various interfaces for direct teleoperation and task automation. It is also equipped with telepresence for bi-directional communication, and wireless sensors for collecting information from patient and environment. This tele-nursing robot is designed to be human-safe, versatile and usable by novice users.
At WPI, we futher improve TRINA’s level of automation, adaptability, and usability in hospital nursing and in-home caring tasks. Beyond medical applications, we aim to endow the TRINA with general-purpose motor skills to assist tasks in warehouse, social service, and manufacturing. To this end, we focus on
- Shared control of complex robot motion coordination, including
- Reach-to-grasp,
- Loco-manipulation
- Perception-action coordination
- Intelligent teleoperation interface, such as
- Whole-body human motion mapping
- Teleoperation intent inference
- Learning and planning in human-robot collaboration, including
- Human-robot handover
- High-level learning and planning of human-robot collaboration
Our research enhances the synergy of healthcare workers with shared-autonomous robots, and develop best practices for worker skill assessment and training.
Representative publications
- Heramb Nemlekar, Dharini Dutia, Zhi Li, “Object Transfer Point Estimation for Fluent Human-Robot Handovers”, In submission to In 2019 IEEE International Conference on Robotics and Automation (ICRA). PDF
- Heramb Nemlekar, Dharini Dutia and Zhi Li, “Prompt Human to Robot Handovers by Estimation of Object Transfer Point based on Human Partner’s Motion”, IROS 2018 Workshop on Human-Robot Cooperation and Collaboration in Manipulation: Advancements and Challenges, Madrid, Spain, October, 2018. PDF
- Sihui Li, Haowei Zhao, and Zhi Li, “Learning Motion Primitives and Task Plan in Teleoperated Robot Motion through Multi-modal Interfaces”, RSS 2018 Workshop on Fundamental Issues in Symbiotic Human-Robot Interaction, Pittsburgh, Pennsylvania, June, 2018. PDF
- Heramb Nemlekar, Max Merlin, and Zhi Li, “High-level Representation of Kinesthetically Learned Motion of Human-Robot Collaborative Tasks”, RSS 2018 Workshop on Learning from Demonstrations for high level robotics tasks, Pittsburgh, Pennsylvania, June, 2018. PDF
- Zhi Li, Peter Moran, Qingyuan Dong, Ryan Shaw, Kris Hauser, “Development of a Tele-Nursing Mobile Manipulator for Remote Care-giving in Quarantine Areas”, In 2017 IEEE International Conference on Robotics and Automation (ICRA), pp. 3581-3586. PDF
- Jianqiao Li, Zhi Li, Kris Hauser, “A Study of Bidirectionally Telepresent Tele-Action During Robot-Mediated Handover”, In 2017 IEEE International Conference on Robotics and Automation (ICRA), pp. 2890-2896. PDF